Dies ist eine alte Version des Dokuments!
Inhaltsverzeichnis
Übungsaufgabe zur Vorlesung Elektrische Antriebe
Vorwort / Randbedingungen
Die Übungsaufgabe ist eine Ergänzung zu unseren Laborübungen und betrachtet simulativ das Verhalten einer permanenterregten Gleichstrommaschine. Ihre Aufgabe besteht darin die Simulationen durchzuführen und in Form eines Laborberichts in Moodle bis zum Semesterende abzugeben. Ggf. besprechen wir einzelne Abschnitte zusammen in der Vorlesung. Falls Sie nicht weiterkommen sprechen Sie mich bitte während der Vorlesung an.
Der Laborbericht kann als Bildergeschichte in Power-Point verfasst sein. Achten Sie aber darauf alle Grafiken zu erklären und vor allem die Ergebnisse zu interpretieren. Eine Abgabe reiner Bilder ohne Erklärung gilt als nicht bestanden. Weiterhin wir als Abgabeformat nur pdf akzeptiert.
Randbedingungen
- Der Versuchsbericht muss bis zum Semesterende abgegeben sein
- Die Abgabe erfolgt in Moodle
- Abgabeformat *.pdf
- Zu jedem Bild gehört eine Erklärung und Interpretation
Ziel der nachfolgenden Übungsaufgaben ist es den Zusammenhang zwischen Drehzahl und dem Drehmoment einer Antriebsmaschine im Zusammenspiel
mit einer mechanischen Last herzustellen. Matlab Simulink ist ideal geeignet physikalisch mehrdimensionale Problem zu koppeln welche wir zur mathematischen
Beschreibung eines elektrischen Antriebsstrangs benötigen. Elektrische Leistung wird in mechanische Leistung überführt und umgekehrt. Damit entfällt die in der Elektrotechnik so häufig eingesetzte Spice-Simulation wie z.B. mit LT-Spice. Auf der anderen Seite bieten mechanische Simulationsprogramme meist keine Möglichkeit die elektrischen Parameter mit zu berücksichtigen.
Die Erweiterung Simscape in Matlab Simulink ermöglicht es mehrdimensionale Probleme aus den Bereichen Elektrotechnik, Mechanik, Fluid, Hydraulik und weitere mit einander zu verbinden.
Aufgabe 1: Vorzeichen, Setup
In den folgenden Übungsaufgaben schauen wir uns das Funktionsverhalten einer permanenterregten (bürstenbehaftete) Gleichstrommaschine genauer an. Dazu starten wir mit einem Gedankenexperiment:
Ich vermute wir alle sind in unserer Kindheit in irgendeiner Weise mit ferngesteuertem Spielzeug, typischerweise Autos, in Berührung gekommen.
Da bis vor wenigen Jahren BLDC-Motoren (Brushless DC- Motoren) kaum Verbreitung gefunden haben können wir getrost davon ausgehen, dass wir damals alle mit
permanenterregten Gleichstrommaschinen gespielt haben. Aus den Erfahrungen die wir gesammelt haben, lassen sich die grundlegenden Eigenschaften der Gleichstrommotoren bereits ableiten.
Überlegen Sie sich bitte was in folgenden Betriebszuständen passiert ist:
- Sie heben das ferngesteuerte Fahrzeug an und geben Vollgas. Was passiert mit der Drehzahl?
- Die Batteriespannung des Fahrzeugs nimmt ab. Was können wir über die Beschleunigung und die maximale Steigung aussagen welche das Fahrzeug noch überwinden kann?
- Auf welchen Untergründen beschleunigen die Fahrzeuge am Schnellsten?
- Was passiert mit der Geschwindigkeit des Fahrzeugs bei Bergfahrt, bei Talfahrt?
- Sie versuchen ein zweites Fahrzeug abzuschleppen. Welche Schlüsse können wir über die Beschleunigung und max. Geschwindigkeit treffen?
Drehzahl- Drehmomentkennlinie
Ich bin mir sicher, Sie konnten die vorangegangenen Fragen problemlos aus eigener Erfahrung heraus beantworten. Als Ingenieure versuchen wir natürlich die Beobachtungen mathematisch zu beschreiben um so das Verhalten für viele weitere Belastungsfälle vorherzusagen.
Bei der Auslegung eines elektrischen Antriebsstrangs spielt die Drehzahl- Drehmomentkennlinie n(M) eine entscheidende Rolle. Oder in Worte: Welche Drehzahl wird sich aufgrund des zu erbringenden Moments der Arbeitsmaschine einstellen. Die Kennlinie stellt also unsere Vorhersage über das Verhalten der Maschine bei äußerer Belastung dar → genau das, was wir vorhaben …
Bei ungeregelten Maschinen, und davon gehen wir erstmals aus, stellt sich die resultierende Drehzahl als Gleichgewicht zwischen der äußeren Last und dem von der Maschine erzeugten Drehmoment ein.
Aufgabe 1a)
Skizzieren Sie die Drehzahl-Drehmomentenkennlinie n(M) einer permanenterregten Gleichstrommaschine
Aufgabe 1b)
Erklären Sie anhand der n(M) Kennlinie die fünf Thesen aus unserem Gedankenexperiment
Sie werden feststellen (hoffentlich), dass alle Arbeitspunkte im ersten Quadranten liegen. Positive Drehzahl, der Motor bringt Moment auf welches wir als positiv definieren und somit folgt daraus eine positive abgegebene Leistung, da P = ω*M. Soweit zu den recht anschaulichen Betriebspunkten. Komplizierter wird es wenn wir uns noch zusätzlich folgende Szenarien anschauen:

Fall 1:
Das Auto fährt bergab und beschleunigt aufgrund dem Gefälle. Logisch, das Fahrzeug wird immer schneller und schneller… Aber wie lange? Kann die Leerlaufdrehzahl überschritten werden? Falls ja,
was wird passieren?
Fall 2:
Dieser Zustand stellt nichts ungewöhnliches dar und haben wir bereits behandelt. Das Fahrzeug wird je nach Untergrund auf einen Endwert beschleunigt und hält dann die Geschwindigkeit
als Resultat der von außen angreifenden Kräfte (Momente am Rad).
Fall 3:
Wir fahren bergauf und werden aufgrund einer hohen Steigung immer langsamer. Wie lange? Was wird passieren falls das von außen angreifende Moment größer ist als das Haltemoment des Motors?
Schauen Sie ggf. online nach dem Begriff Gegenstrombremsbetrieb.
Aufgabe 1c)
Zeichnen Sie die n(M) Kennlinie und beschriften Sie in welchen Quadranten die Fälle 1- 3 auftreten können. Markieren Sie beispielhaft für jeden Fall einen Arbeitspunkt der sich einstellen kann.
Erklären Sie was in diesen Zuständen passiert. Bitte geben Sie eine Prognose für den Stromfluß in den Motorklemmen in Form der Kennlinie I(M). Erklären Sie das Verhalten der Kurve.
Wir starten jetzt mit der Simulation. Falls Sie bereits mit Simulationsprogrammen Erfahrungen gesammelt haben wissen Sie vielleicht, dass die Programme manchmal dazu neigen Sie anzulügen. Das geschieht in den seltensten Fällen mit boshafter Absicht. Vielmehr ist vermutlich ein Parameter nicht richtig gesetzt oder die Simulation arbeitet zu ungenau. Ein Klassiker ist die Verwechslung von Punkt und Komma Notation bei der Angabe von Dezimalzahlen. Das bedeutet aber im Umkehrschluss: Bevor die Simulation startet sollten Sie in der Lage sein das Ergebnis zu skizzieren. Vom Kurvenverlauf darf man sich gerne abschnittsweise überraschen lassen bzw. erklärbar sein, die Extrempunkte sind allerdings nie verhandelbar. Mit Extrempunkte meine ich hier die Punkte n(0Nm) und n(M) = 0 1/min. Sollten Sie hier anderer Meinung sein als das Simulationsprogramm ist äußerste Vorsicht geboten!
Ich habe für Sie die für die Grundsimulation notwendigen Elemente in einem Setup zusammengestellt.
Enthaltene Modelle:
- Ideale fremderregten Gleichstrommaschine
- Messpunkt zur Strommessung
- Messpunkt zur Drehzahlmessung
- Instrument zur Drehmomentmessung
- Einstellbare mechanische Last
Ihre Aufgabe ist es im ersten Schritt die Modelle so anzuordnen und aufzubauen, dass daraus ein elektrischer Antriebsstrang wird mit den Hauptelementen
Elektr. Energieversorgung → Antriebsmaschine → Mechanische Last
Bitte verlieren Sie das Ziel nicht aus den Augen, uns in Matlab die n(M) Kurve der Maschine generieren zu lassen.
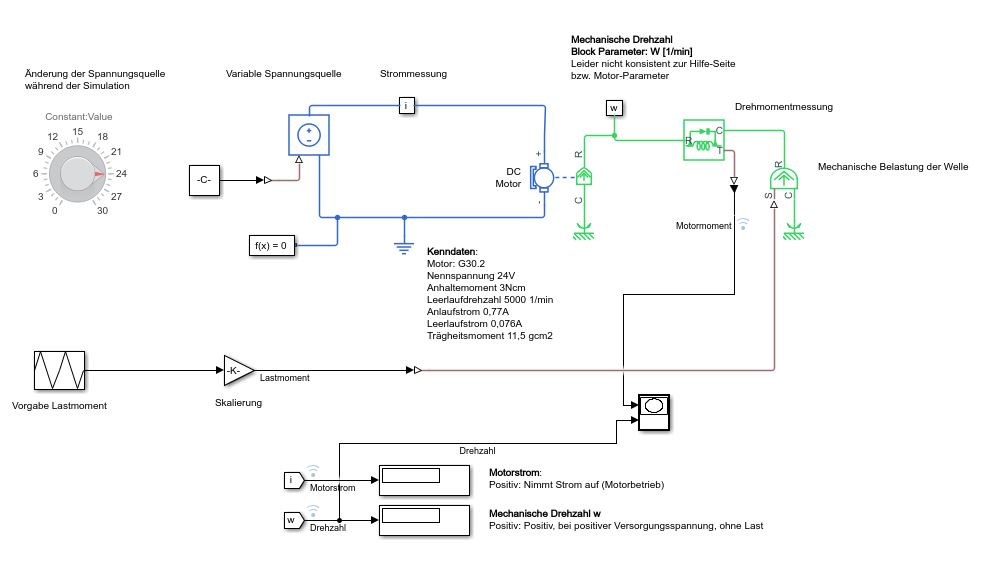
Nachfolgen finden Sie ein Beispiel wie der Gesamtaufbau aussehen kann. Wie so oft gibt es nicht nur eine Lösung. Es gibt vielfältige Möglichkeiten die Parameter der Antriebsmaschine zu erfassen. Zur schnellen Änderung der Versorgungsspannung habe ich eine Dashboard-Element eingefügt das in der Lage ist die Versorgungsspannung anzupassen. Weiterhin gibt es die Möglichkeit über einen XY-Schreiber sich die n(M) Kurve direkt anzeigen zu lassen. Allerdings sind die Anzeigeoptionen sehr bescheiden. Einfacher ist es später den Data-Inspector zu verwenden und über ein m-File oder über die Konsole sich die gewünschten Grafiken nach dem Simulationsdurchlauf zu erzeugen.
Machen Sie sich bitte nun mit geeigneten Anzeigeinstrumenten mit dem Aufbau vertraut und spielen Sie einige Fälle durch. Es geht jetzt primär darum die Vorzeichen zu verstehen. Notieren Sie sich dazu jeweils stichwortartig die Zusammenhänge. (z.B. Positiver Motorstrom → positive Drehzahl falls Lastmoment < Anzugsmoment)
Zum Beispiel:
- Beobachten Sie die Leerlaufdrehzahl bei Variation der Versorgungsspannung
- Beobachten Sie die Drehzahl bei Variation des Lastmoments
- Beobachten Sie die Stromaufnahme in Abhängigkeit es Lastmoments
Alle Größen können sowohl positiv als auch negativ sein!
Aufgabe 2: Drehzahl, Drehmoment
Im nächsten Schritt geht es darum den Motor zu konfigurieren. Am Markt sind unzählige Gleichstrommaschinen verfügbar die wir normalerweise nach den Anforderungen (der Last) auswählen.
Da wir keine konkrete Anwendung betrachten und die Last unseren Gesetzen (physikalischer Port der idealen Last) gehorcht können wir andersherum vorgehen.
Zur Simulation greifen wir auf Motoren von Dunkermotoren zurück. Da hier alle Motoren sehr gut beschrieben sind können wir unsere Simulationsergebnisse
mit dem gegebenen Datenblatt direkt vergleichen.
Aufgabe 2a)
- Wählen Sie bei Dunkermotoren einen bürstenbehafteten Gleichstrommotor aus mit einer Leistung, welcher Ihren drei letzten Ziffern der Matrikelnummer am nächsten kommt. Beispiel: Ihre Matrikelnummer lautet 123456 → Gewünschte Leistung 456W → Verfügbarer Motor mit 370W, GR80X40, 60V
- Skizzieren Sie die n(M) Kennlinie mit Hilfe des Datenblatts
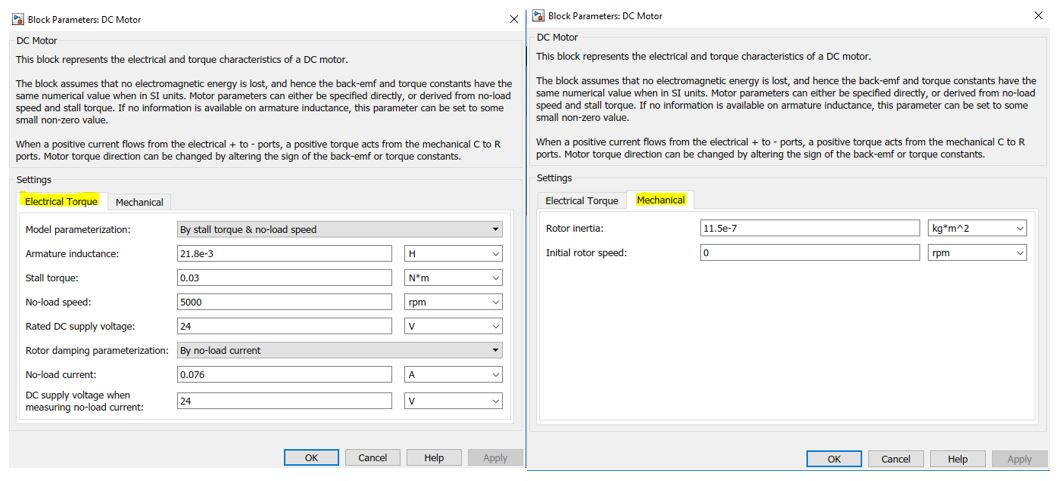
Übertragung der Motordaten in Simulink
Im nächsten Schritt geht es darum die Kenndaten des Motors Simulink mitzuteilen. Da es sich bei der n(M) Kennlinie um eine einfache gerade handelt reichen zwei Punkte aus die Kurve zu beschreiben. Wenn Sie das Datenblatt anschauen werden Sie feststellen, dass das Problem deutlich überbestimmt ist. Daher gibt es auch mehrere Möglichkeiten in Matlab die Kennlinie zu beschreiben, je nachdem welche Parameter bekannt sind.
Anbei ein Beispiel für den Motor welcher ich Ihnen in das Setup kopiert habe. Hierbei handelt es sich um den Motor G30.2, 24V.
 Ab jetzt ist unser Setup wirklich vollständig und wir können uns an die Ermittlung der n(M) Kennlinie machen. Wie immer gibt es mehrere Möglichkeiten. Variante 1: Sie fahren verschiedene Punkte manuell mit Hilfe der idealen Last an und notieren sich die resultierende Drehzahl. Das wäre zu einfach!
Ab jetzt ist unser Setup wirklich vollständig und wir können uns an die Ermittlung der n(M) Kennlinie machen. Wie immer gibt es mehrere Möglichkeiten. Variante 1: Sie fahren verschiedene Punkte manuell mit Hilfe der idealen Last an und notieren sich die resultierende Drehzahl. Das wäre zu einfach!
Variante 2: Sie automatisieren den Testablauf mit Hilfe einer zeitabhängigen Laständerung, zeichnen die Daten auf und brauchen dann nur noch abzuwarten. Danach erzeugen Sie den Plot in Matlab über ein Script.
Aufgabe 2b)
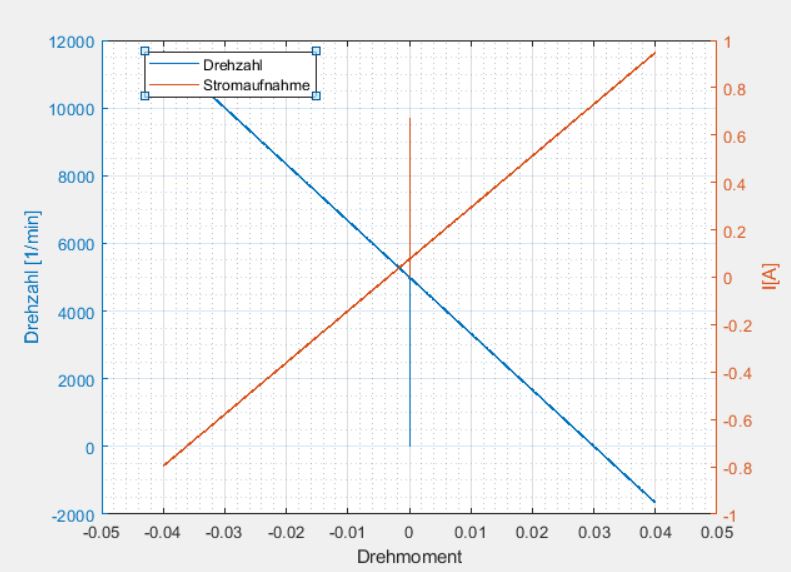
Erstellen Sie die Kennlinien n(M) und I(M) (Stromaufnahme in Abhängigkeit vom Motormoment) für Ihren Motor. Achten Sie darauf alle drei Quadranten zu durchfahren! Vergleichen Sie das Ergebnis mit Ihrer Prognose aus Aufgabe 1c). Ordnen Sie erneut allen Quadranten Belastungsfälle zu.
So könnte Ihre Kennlinie aussehen.
Aufgabe 2c)
Erstellen Sie eine Kurvenschar an n(M) Kennlinien in Abhängigkeit der Versorgungsspannung des Motors.
Aufgabe 3: Regelung auf konstante Drehzahl
Bisher haben wir die elektrische Antriebsmaschine mit Hilfe der Versorgungsspannung und der äußeren Belastung beeinflusst, bzw. die Drehzahl geändert. Allerdings sehr passiv, im Sinne einer klassischen Steuerung. Die Königsdisziplin besteht natürlich darin die Versorgungsspannung so zu manipulieren, dass einer der beschreibenden
Parameter konstant bleibt.
Regelung auf:
- Konstante Position
- Konstante Drehzahl
- Konstantes Moment
- Konstante Leistungsaufnahme
Die Kennlinien der Arbeitsmaschine welche wir uns zuvor hergeleitet haben nennt sich auch die „natürliche“ Kennlinie der Gleichstrommaschine. Wie gesehen stellt sich die resultierend Drehzahl als Gleichgewicht zwischen den Momenten ein. Die n(M) Kennlinie einer geregelten Maschine hat typischerweise nichts mehr mit dieser Kennlinie zu tun. Durch die Regelung sind wir in der Lage innerhalb der erlaubten Betriebsgrenzen der Maschine beliebige n(M) Kurven zu fahren. Je nach Anwendung werden verschiedene Regelstrategien verwendet. So benötigen z.B. Werkzeugmaschinen oder generell Prozessmaschinen eine von der Belastung unabhängige konstante Drehzahl. Elektrische Fahrzeuge hingegen werden auf konstantes Moment geregelt, das bedeutet die Gaspedalstellung entspricht einem Momentenwunsch. Roboterarme oder Förderbänder benötigen eine exakte Winkeleinstellung, womit sich die Regelung auf einen stationären Winkel anbietet.
Viele Maschinen sind heute mit einer elektronischen Regeleinheit ausgestattet, allerdings natürlich bei weitem nicht alle. Ursächlich dafür sind wie so oft die Produktkosten. Nichts ist umsonst, schon gar keine Leistungselektronik. Daher macht es durchaus für viele Anwendungen Sinn die natürliche Kennlinie im Zusammenspiel mit der Anforderung der Last zu verwenden. Wer braucht schon geregelte Fensterheber oder eine Rasenmäher mit fester Drehzahl?
Die letzte Teilaufgabe besteht darin für Ihren Motor eine Drehzahlregelung aufzubauen. Das Ziel ist es nicht die optimalen Regelparameter zu finden. Sie können entweder einen bereitgestellten PID-Reglerbaustein aus der Matlab-Bibliothek verwenden oder mit Hilfe des Videos ihren eigenen Regler aufbauen. Der Matlab-Baustein erlaubt es mit dem Tool „Automated Tunig“ automatisch ideale Regelparameter zu ermitteln (hierzu muss allerdings die Toolbox „Simulink Control Design“ installiert sein). Dazu linearisiert Matlab für Sie die Übertragungsstrecke und berechnet die Parameter für die gewünschte Sprungantwort. Das eigene Modell erlaubt hingegen einen besseren Einblick in die Funktion des Regleraufbaus.
Verifizieren Sie die Regelung indem Sie den Motor mit periodischen Lastsprüngen oder Soll- (Drehzahlsprünge) beaufschlagen. Stellen Sie die Soll- und Istgrößen grafisch gegenüber und machen Sie kenntlich ab wann der Regler in Begrenzung kommt.
Aufgabe 3a)
- Entwerfen Sie eine Drehzahlregelung und verifizieren/dokumentieren Sie deren Funktion. Treffen Sie geeignete Vorkehrungen, dass die Betriebsgrenzen des Motors nicht verlassen werden. Testen Sie gezielt das Anfahren der Betriebsgrenzen und machen Sie jeweils kenntlich welcher Parameter die limitierende Größe ist. Geben Sie dem Regler die Bemessungsdrehzahl als Sollvorgabe und ermitteln Sie erneut die Drehzahl- Drehmomentenkennlinie ihres Motors zusammen mit der Regelung.
- In vielen Fällen ist es auch notwendig den Motorstrom zu begrenzen. Dazu werden kaskadierte Regler verwendet. Skizzieren Sie eine kaskadierte Regelung (Drehzahlregelung mit unterlagerter Stromregelung) und überlegen Sie sich wie die n(M) Kennlinie verläuft in Abhängigkeit der Solldrehzahl und des maximalen Stromwertes.
Nachfolgende Videos zeigen eine Anwendung der Stromregelung
und der Drehzahlregelung mit unterlagerter Stromregelung mit einer kurzen Zusammenfassung der betrachteten Regelmöglichkeiten unserer Gleichstrommaschine.
Abschluss
Ich würde mich über ein kurzes Feedback zur ersten Simulationsaufgabe freuen. Bitte beantworten Sie mir optional folgende Fragen:
- Wie sinnvoll fanden Sie die Übungsaufgaben: Bitte eine Angabe in Schulnoten (1-6)
- Wie lange haben Sie zur Bearbeitung der Aufgaben benötigt (in Stunden)
- Langfristig: Was würden Sie davon halten in der (Präsenz-)Vorlesung mehrere solcher Versuche zu besprechen, und sich dafür einen Teil der theoretischen Vorlesung mit Hilfe von Videos zu erarbeiten?
- Was Ihnen sonst so einfällt zum Versuch ….
Zur ersten Übungsaufgabe soll es zukünftig auch einen praktischen Versuchsaufbau geben an dem Sie Ihre aufgebaute Regelung im realen Aufbau testen können. Dazu gibt es eine Reihe an Projekt- und Abschlussarbeiten. Falls Sie Interesse haben melden Sie sich bitte bei mir.
— Heinz Rebholz 2020/01/03 21:07