Inhaltsverzeichnis
Versuch A: Motorprüfstand Gleichstrommaschine
Einleitung
Wie im Selbstlernversuche gesehen kann eine Simulation prinzipiell das Verhalten einer elektrischer Maschinen sehr gut nachbilden. Natürlich löst das Simulationstool
lediglich die hinterlegten Gleichungen, typischerweise in Form von Differenzialgleichungen, um den aktuellen Zustand der Maschine zu berechnen. Theoretisch können wir das auch von Hand ….
Das reale Verhalten wie ein Momentenrippel, zappelnde Messerwerte, das Geräusch einer drehenden Welle und vor allem die visuelle Rückmeldung bleiben natürlich aus.
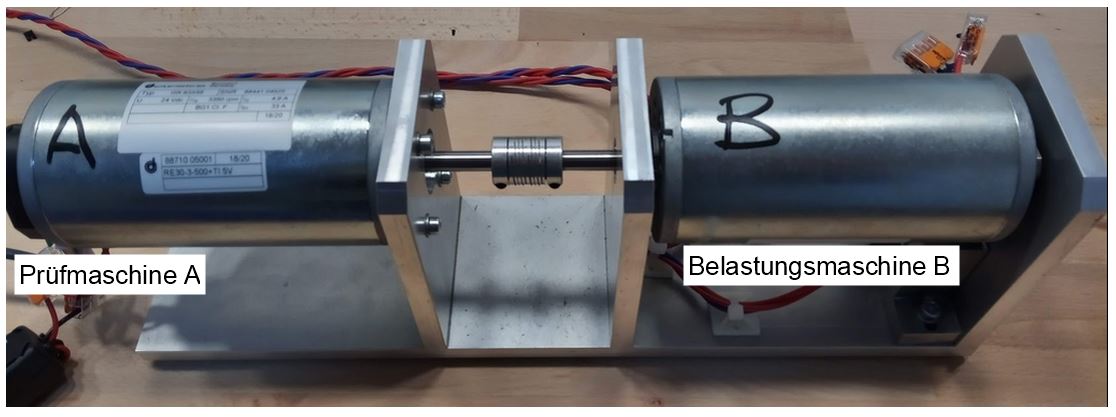
Aus diesen Gründen holen wir jetzt den Simulationsversuch in die reale Welt. Die zu untersuchende Gleichstrommaschine wird dazu über ihre Welle mit einer zweiten baugleichen Maschine verbunden.
Die gekoppelte Maschine arbeitet dabei im generatorischen Betrieb, womit die Bremsenergie wieder in die Versorgung zurückgespeist wird. Die durch das Bremsmoment erzeugte Energie muss also nicht
unnötigerweise in Wärme umgewandelt werden.
Aufgabenbeschreibung
Beide Motoren lassen sich komfortabel über die Matlab Simulink Oberfläche steuern. Dazu sendet der auf der Endstufe eingesetzt Mikrocontroller im 100ms Raster alle relevanten Motordaten über eine serielle Schnittstelle. Gleichzeitig nimmt er die Steuerbefehle wie z.B. Drehrichtung, Spannung usw. entgegen. Innerhalb der Simulinkumgebung können sie selber entscheiden wie sie die beiden Motoren ansteuern um die notwendigen Kennlinien zu erhalten.

Folgende Versuche sind im Folgenden zu bearbeiten:
- Funktionsweise eine H-Brücke
- Pulsweitenmodulation
- Leerlaufkennlinie der Gleichstrommaschine n(U) und I(n)
- Generatorbetrieb Ausgangsspannung in Abhängigkeit der Drehzahl
- Drehzahl- Drehmomentenkennlinie M(n)
- Gegenstrombremsbetrieb
H-Brücke
Es gibt verschiedenste leistungselektronische Schaltungen welche in der Lage sind eine Gleichstrommaschine anzusteuern. Die Auswahl erfolgt je nach Anwendungsfall. Die allgemeinste Schaltung stellt eine sogenannte H-Brücke dar. Sie ist in der Lage alle Quadranten abzudecken, also Vorwärts- / Rückwärts bei motorischem und auch generatorischen Betrieb. Allerdings ist die H-Brücke mit insgesamt vier Halbleiterschaltern auch die aufwendigste. Erfordert die Anwendung nur eine Drehrichtung im Motorbetrieb wäre ein Halbleiterschalter bereits ausreichend.

Im Bild dargestellt ist die H-Brückenschaltung mit den vier notwendigen Schaltern und dem Motor in der Mitte der Brücke. Werden die Schalter S1 und S4 geschlossen, verbinden wir den linken Motoranschluss mit + UBat, den rechten Anschluss mit GND. Damit liegt die volle Versorgungsspannung über dem Motor an. Nehmen wir einfach an, das wäre dann der Rechtslauf.
Aufgabe 1a)
Erstellen Sie eine Skizze der H-Brücke und zeichnen Sie die Schalterstellungen und den Stromfluss für den Linkslauf.
Aufgabe 1b)
Es sind noch weitere Kombinationen der Schalter S1-S4 möglich. Nennen Sie alle Möglichkeiten und überlegen Sie sich in welchem Zustand sicher der Motor dabei befindet.
Pulsweitenmodulation
Unsere Schaltung (H-Brücke) ist zwar in der Lage den Motor in beide Richtungen zu treiben, allerdings jeweils nur mit der vollen Versorgungsspannung.
Also entweder maximaler Rechts- oder Linkslauf. Das ist für moderne Motorapplikationen natürlich nicht zielführend und wir benötigen eine Möglichkeit
zur stufenlosen Einstellung der Motorspannung. Helfen kann uns hier das Verfahren der Pulsweitenmodulation (PWM). Die Umsetzung ist deutlich einfacher als das was sich
hinter dem Namen verstecken mag.
Starten wir mit folgendem Gedankenexperiment: Sie betätigen den Hauptschalter des Motors im Sekundentakt, also 1 Sekunde an, danach 1 Sekunde aus. Dann ist es naheliegend, dass Sie dem Motor die halbe Energiemenge zuführen im Vergleich dazu, wenn der Schalter dauerhaft geschlossen wäre. Sie können jetzt die Einschaltdauer im Vergleich zu den Auszeiten beliebig variieren und so jede gewünschte Energiemenge der Maschine zuführen. Exakt so arbeitet zum Beispiel auch ein Raumthermostat. Nur dass hier die Zeitintervall noch einmal deutlich größer sind.
Bisher haben wir nur auf die Energiemenge geschaut. Je nach Massenträgheit des Rotors hat unser Verfahren natürlich den Nachteil, dass die Drehzahl sich sehr unvorteilhaft entwickelt. Aufgrund der langen Zeitintervalle wird sie sehr stark schwanken. Im Beispiel (1 Sekunde an, 1 Sekunde aus) sogar zu Null und dann wieder auf die maximale Drehzahl springen. Stellen wir uns jetzt vor wir schalten einfach schneller. Am besten so schnell, dass der Rotor aufgrund seiner Massenträgheit die Geschwindigkeit hält. Von Hand ist das natürlich nicht zu schaffen. Daher verwenden wir keine gewöhnlichen Schalter sondern setzen Leistungshalbleiter ein. Typischerweise kommen dabei N-Kanal Mosfets (selbstsperrend) zum Einsatz.
Unser Motorprüfstand betätigt den Schalter mit ca. 20kHz. Das bedeutet die Schalthandlung wird 20000 mal pro Sekunde durchgeführt. Aufgrund der Ankerinduktivität und der Massenträgheit des Rotors bleibt die Drehzahl trotz PWM-Ansteuerung dabei dennoch konstant.
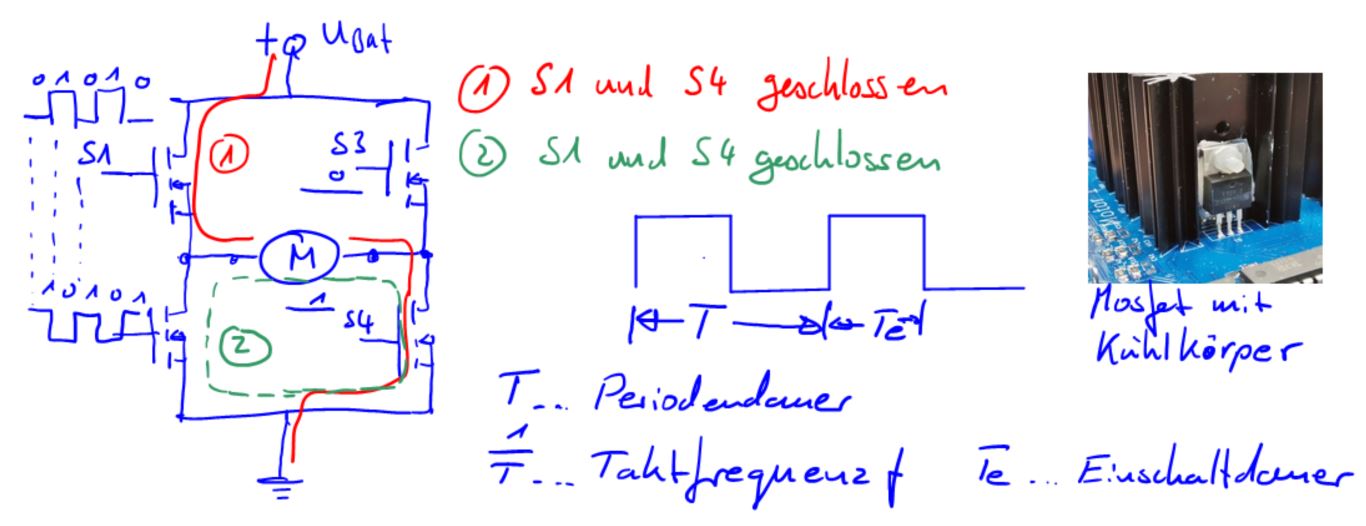
ACHTUNG BILD SCHALTERSTELLUNGEN BEARBEITEN
Im Bild dargestellt ist die H-Brücke, jetzt mit Mosfets und deren Ansteuerungssequenz. Typischerweise werden die Mosfets einer Halbbrücke (S1 und S2, S3 und S4) invertiert zueinander geschaltet. Das Verhältnis zwischen Einschaltdauer Te und Periodendauer T wird als Puls-Pausen-Verhältnis oder engl. Duty D bezeichnet.
Aufgabe 1c) Leiten Sie sich mit Hilfe dem Gedankenexperiment die Gleichung für die Motorspannung in Abhängigkeit des Puls-Pausen-Verhältnis und der Batteriespannung her. Überlegen Sie sich dazu zuerst die Punkte Te = 0s, Te = T/2, Te = T.
Prüfstand
Bevor wir mit der eigentlichen Versuchsdurchführung starten schauen wir uns die einzelnen Komponenten des Versuchsstands im Detail an. Neben den Motoren benötigen wir einen Encoder zur Ermittlung der Drehzahl. Die mechanische Leistung berechnet sich aus der Drehzahl und dem Drehmoment. Das bedeutet wir benötigen zusätzlich noch eine Möglichkeit zur Ermittlung des anliegenden Drehmoments.
Gleichstrommotoren
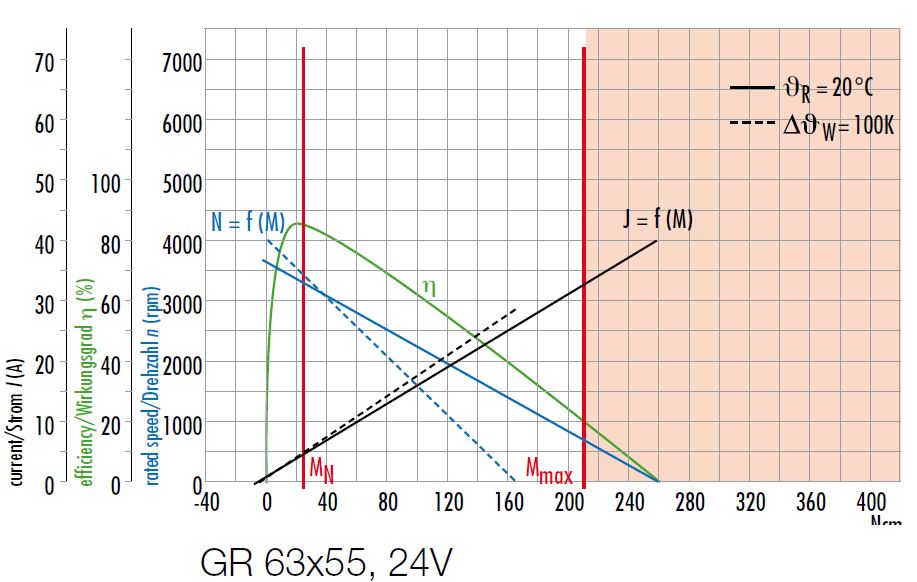
Der Prüfstand verwendet als Last- und Bremsmaschine die Gleichstrommotoren der Firma Dunkermotoren GR63x55 in der 24V Version.
Folgende Abbildung zeigt die wichtigsten Kennlinien der Maschine.
 Das vollständige Datenblatt und die Kenndaten der Maschine finden sie auf der Homepage der Firma
Dunkermotoren. Einen Teil der Kennlinien werden wir mit Hilfe des Versuchsstands
im Folgenden selber ausmessen.
Das vollständige Datenblatt und die Kenndaten der Maschine finden sie auf der Homepage der Firma
Dunkermotoren. Einen Teil der Kennlinien werden wir mit Hilfe des Versuchsstands
im Folgenden selber ausmessen.
Aufgabe 1d): Recherchieren Sie im Datenblatt alle wichtigen Kenndaten der Maschine wie
Leerlaufdrehzahl, Nennmoment, Anhaltemoment, Anlaufstrom und Entmagnetisierungsstrom.
Aufgabe 1e) Der maximale Anlaufstrom dieser Maschine ist größer als der Entmagnetisierungsstrom. Worauf müssen Sie in diesem Fall achten?
Encoder
Der Encoder ist am Ende des Motors A verbaut und mit der durch beide Wellen verlaufende Antriebswelle verbunden. Bei einer Umdrehung gibt der Encoder 1000 Impulse aus, was einer Winkelauflösung von 0,36° entspricht. Die Impulse werden mit Hilfe einer Lichtschranke gebildet welche aus einer Fotodiode und einer gelochten Scheibe besteht. Um auch die Drehrichtung zu detektieren werden zwei Fotodioden verwendet, welche geometrisch versetzt zueinander angeordnet sind. Die Drehrichtung wird dann aus der Impulsfolge der beiden Kanäle A und B, im nachfolgenden Bild QEPA und QEPB bestimmt.

Die Abbildung zeigt den Aufbau des Encoders und die Anbindung an unserem Versuchsmotor A. Zusätzlich zu den über dem Umfang verteilten 500 Aussparungen ist ein zusätzlichen Stanzung vorhanden. Das sogenannte Index-Signal QEPI gibt einen Impuls pro Umdrehung aus, womit sehr einfach die Anzahl an erfolgten Umdrehungen ermittelt werden kann. Zur Drehzahlmessung verwendet unser Mikrocontroller die beiden Signale QEPA und QEPB des Encoders RE30/500 von Dunkermotoren. Das Indexsignal wird in diesem Versuch nicht ausgewertet. Link zum Datenblatt re56-8871005210.pdf
Drehmoment
Die Messung des vom Motor erzeugten Drehmoment stellt die größte Hürde im Prüfstandsaufbau dar. Zugegeben, es kann sehr einfach gehen wenn man genug Geld in die Hand nimmt und Messwellen auf Basis von Dehnungsmessstreifen einsetzt. Nachteilig sind die hohen Anschaffungskosten von typischerweise mehreren tausend Euro. Da es uns nicht darum geht die Motordaten möglichst exakt zu erfassen, sondern eher um die prinzipiellen Verläufe, verwenden wir deutlich günstigere Kraftsensoren und ermitteln das Drehmoment indirekt über einen Hebelarm. Dazu wird die Belastungsmaschine B frei gelagert.

Tritt eine Belastung der Maschine auf stützt sie sich über den Hebelarm auf den Kraftsensoren ab, eine sogenannte Drehmomentstütze. Bei bekannter Länge des Hebelarms lässt sich aus der erfassten Kraft F das am Motorgehäuse angreifende Drehmoment ermitteln welches dem Moment an der Welle entspricht.
Strom- und Spannungsmessung
Neben den mechanischen Größen zur Zustandserfassung der Welle werden die elektrischen Parameter des Motors ermittelt. Dazu misst der Mikrocontroller kontinuierlich die Versorgungsspannung, die Stromaufnahme der H-Brücke und den Motorstrom. Die Daten werden zusammen mit den Rohdaten (Werte der Analog-/Digitalwander) über die serielle Schnittstelle an Matlab Simulink übertragen. Die Umrechnung auf die gemessene physikalische Größe erfolgt dann am PC. Sie können die Berechnungskette in der Simulink-Vorlage nachvollziehen wenn Sie den einzelnen Signalen bis zur Schnittstelle folgen.
Gesamtübersicht / Blockschaltbild
Das vereinfachte Blockschaltbild zeigt die eingesetzten Komponenten im Verbund in vereinfachter Darstellung. Die Bezeichnung der physikalischen Größen entspricht bereits der Signalbezeichnung in Simulink.
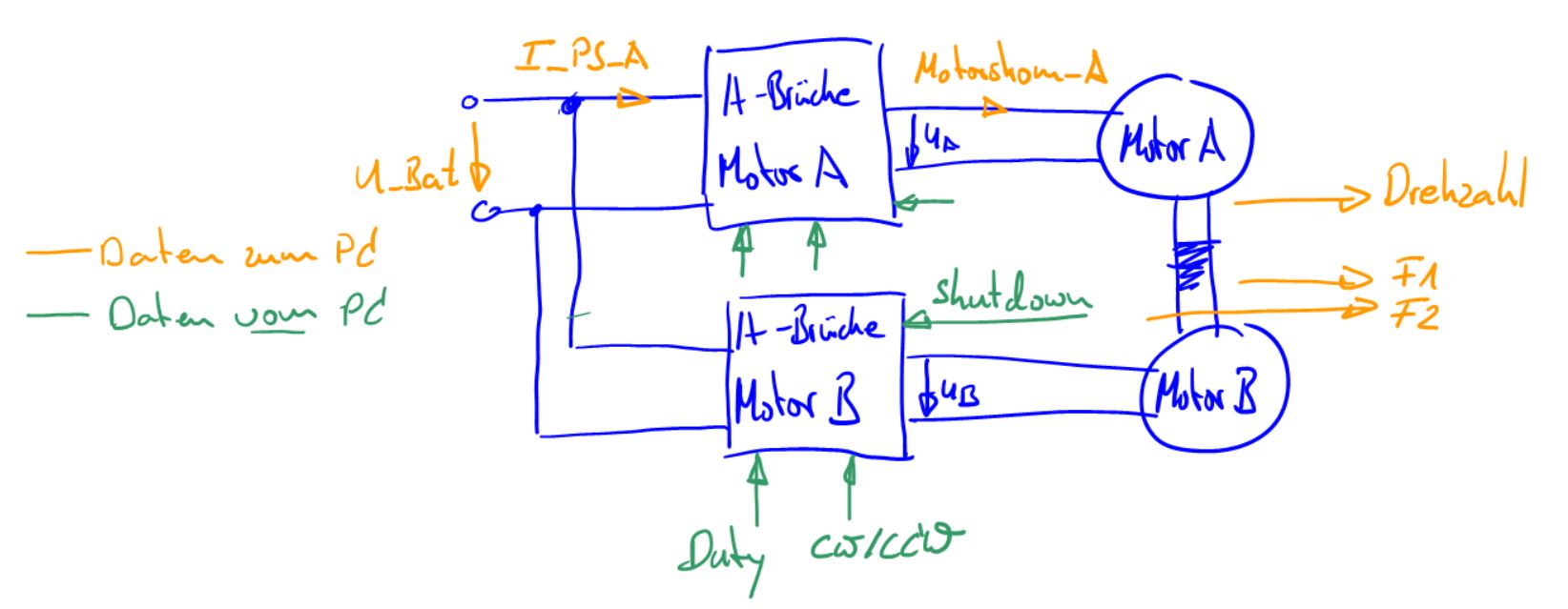
In oranger Farbe dargestellt sind die Daten welche vom Mikrocontroller an Simulink übertragen werden. Steuerbefehle von Simulink zum Prüfstand sind in Grün dargestellt. Die Daten werden alle 100ms aktualisiert.
Simulinkumgebung
Schauen wir uns nun an wie wir den Prüfstand mit Hilfe von Simulink bedienen können. Laden Sie sich dazu bitte die Vorlage herunter vorlage_versuch_a_hostread_v03_hw_v03.zip in der alle wichtigen Blöcke bereits vorhanden sind. Im Ordner befinden sich Vorlagen für Matlab 2021a, 2020b und 2019b.

Die wichtigsten Blöcke im Detail:
Empfangs-/Sendemodul
Dieser Block stellt uns die Daten vom Prüfstand zur Verfügung. Sie finden darin die Signale aus dem zuvor gezeigten Blockschaltbild wieder (orange Signale wie U_Bat, I_PS_A, usw.). Mit einem Doppelklick
gelangen sie zum internen Aufbau bzw. die Signalaufbereitung vom ADC-Wert bis zu physikalischen Größe. Zu beachten ist, dass die an Ausgangsport des Blocks ausgegebene Signale einheitslose Simulink-Signale darstellen. Eine Konvertierung wie in Simscape ist nicht notwendig.
Motor-Modul A
Zur Ansteuerung der Motoren müssen drei Signale definiert werden. Über Duty [0…100] haben wir direkten Zugriff auf das PWM-Verhältnis der Brückenschaltung. Der Wertebereich erstreckt sich von 0 - 100% und wird mit einer Auflösung von 1/10 (0,1) übertragen. Aus technischen Gründen beträgt der maximale Wert 98%. Das bedeutet, der Mikrocontroller begrenzt das maximale Puls-Pausenverhältnis auf diesen Wert, selbst wenn wir über Simulink mehr anfordern.
CW/CCW [0 1] steht für Clock-Wise oder entsprechend Counter Clock-Wise und definiert die Drehrichtung. Zum Schutz der Maschinen und der Elektronik ist es nicht möglich die Drehrichtung im laufenden Betrieb zu ändern. Die H-Brücke muss dazu zuerst über den Shutdown [1 0] deaktiviert werden. Ein Signalpegel von 1 deaktiviert alle Mosfets der Schaltung und die Anschlüsse des Motors sind ohne festes Potenzial (analog offener Motorklemmen), der Motor befindet sich im Freilauf.
Motor-Modul B
Das Motor-Modul B ist nahezu identisch zum Modul A. Da es sich um dem Bremsmotor handelt werden allerdings von diesem Modul keine Ströme aufgezeichnet. Die Steuerungsbefehle (Duty, Drehrichtung und Aktivierung) sind identisch.
Inbetriebnahme
Grundregeln:
- Die Wellenabdeckung darf nur bei stehendem Motor oder sehr kleinen Drehzahlen geöffnet werden!
- Niemals Leitungen (Stecker der Endstufe) unter Last ziehen! Auftretende transiente Überspannungen können zur Zerstörung der Endstufen führen. (Endstufen über Shutdown zuerst deaktivieren)
Bevor wir die Motoren bestromen sind noch ein paar vorbereitende Maßnahmen notwendig. Theoretisch können sie während der Versuche nichts gravierendes falsch machen außer, die Motoren drehen mit höher Drehzahl an der Welle in unterschiedliche Richtungen. Einer der Motoren würde sich dabei im Gegenstrombremsbetrieb befinden und einen zu hohen Strom aufnehmen.Bitte schauen Sie sich zur Vorbereitung das Video zum Setup an, siehe unten.
- Überprüfen Sie zuerst die Einstellungen der Spannungsversorgung für den Leistungsteil. Stellen Sie dazu die Spannung auf 25V und die Strombegrenzung auf 10A. Die Strombegrenzung lässt sich einstellen bei deaktiviertem Ausgang. Sobald der Ausgang aktiv ist schält das Display um und zeigt den aktuell fließenden Strom an.
- Stecken Sie Motor A in die vorgesehenen Anschluss an der Leistungselektronik. Stellen Sie den Duty_A auf ca. 20% und starten Sie den Motor (In Simulink zuvor auf Run drücken). Überprüfen Sie jetzt ob sich Motor A in die angegebene Richtung dreht (Blickrichtung auf die jeweilige Motorwelle definiert die Drehrichtung). Falls die Drehrichtung nicht stimmt, tauschen Sie bitte die Anschlüsse am Motor und überprüfen Sie die Drehrichtung erneut. Achtung: Falls die Kommunikation nicht aufgebaut werden kann überprüfen Sie bitte ob der richtige COM-Port ausgewählt ist im Empfangs-/Sendemodul. Setzten Sie ggf. den Wert für die richtige serielle Schnittstelle an drei Positionen (Allgemeine Portkonfiguration, Sendeblock und Empfangsblock).
- Deaktivieren Sie Motor A und wiederholen Sie bitte die Drehrichtungskontrolle für Motor B
- Stellen Sie jetzt sicher, dass die Richtungsschalter der beiden Motoren in unterschiedliche Richtungen gestellt sind. zum Beispiel Motor A auf CW, Motor auf CCW oder umgekehrt. Überprüfen Sie erneut, dass beide Motoren die Welle in die gleiche Richtung bewegen.
- Verbinden Sie jetzt die Kraftsensoren mit der Platine. Drehen Sie jetzt von Hand das Gehäuse von Motor B in beide Richtungen und überprüfen Sie ob die Sensoren ein Signal ausgeben.
- Jetzt fehlt nur noch das Encodersignal. Verbinden Sie den Encoder mit der Platine und überprüfen Sie das Signal durch drehen der Motorwelle
Leerlaufverhalten
Bevor wir den Versuchsmotor A belasten schauen wir uns dessen Leerlaufverhalten an. Das bedeutet wir wollen herausfinden wie sich die Drehzahl über der angelegten Spannung entwickelt. Bitte beachten Sie bei allen nachfolgenden Versuchen, dass die Motoren Zeit benötigen sich auf die neuen Randbedingungen einzustellen. Das elektrische System ist deutlich schneller als der mechanische Aufbau. Das bedeutet wir müssen stets abwarten bis Beschleunigungsvorgänge abgeschlossen sind und das System sich im eingeschwungenen Zustand befindet.
Aufgabe 2a): Ermitteln Sie die Leerlaufkennlinie n(U) des Motors. (Drehzahl über Motorspannung)
Aufgabe 2b): Erklären Sie in Stichworten warum sich die Maschine so verhält. Klar, dass die Drehzahl erhöht wird bei höherer Spannung wussten wir schon vorher, aber welcher physikalische Effekt steckt dahinter. Gibt es theoretisch noch weitere Möglichkeiten die Leerlaufdrehzahl zu beeinflussen?
Aufgabe 2c): Ermitteln Sie jetzt noch die Stromaufnahme des Motors in Abhängigkeit der Leerlaufdrehzahl, als I(n).
Aufgabe 2d): Warum nimmt der Motor selbst im Leerlauf Strom auf und warum nimmt dieser über die Drehzahl zu?
Aufgabe 2e): Was können wir in diesen Arbeitspunkten über den Wirkungsgrad der Maschine aussagen?
Generatorbetrieb
Bevor wir unsere Versuchsmaschine A belasten können müssen wir uns überlegen wie die Belastungsmaschine B im Generatorbetrieb arbeitet. Beide Maschinen sind vollkommen identisch und wir könnten problemlos die Rollen tauschen.
Aufgabe 3a): Messen Sie jetzt mit einem Multimeter die induzierte Spannung an den Klemmen des Motors B in Abhängigkeit der Drehzahl wenn dieser durch die Maschine A angetrieben wird.
Aufgabe 3b): Natürlich überrascht uns das Ergebnis nicht…. Von welchen Parametern hängt die induzierte Spannung ab, nennen Sie die Gleichung?
Allerdings fließt noch kein Strom! Das bedeutet wenn wir Maschine B generatorisch belasten möchten müssen wir den Stromkreis schließen. Zuvor aber noch folgendes Gedankenexperiment. Stellen Sie sich vor wir schließen beide Motoren an eine Spannungsversorgung mit 24V an, so dass beide Motoren eine gemeinsame Welle in die identische Richtung antreiben (nachfolgendes Bild I). Gehen wir von exakt identischen Motoren aus, dann wird jeder Motor für sich die Reibkraft überwinden und jeder Motor nimmt den zuvor ermittelten Strom im Leerlauf auf.

In der Realität ist es natürlich sehr unwahrscheinlich zwei exakt gleiche Motoren zu finden und auch zwei Batterien mit dem exakt gleichen Ladezustand. Gehen wir also jetzt davon aus, dass die Batterie an Motor B nur auf 22V geladen ist. Ohne gekoppelte Welle würden sich unterschiedliche Drehzahlen einstellen. Da wir aber über die gekoppelte Welle identische Drehzahlen erzwingen wechselt Motor B in den Generatorbetrieb. Die Stromrichtung dreht sich um, die Batterie wird geladen. Ein direktes Kriterium für den Generatorbetrieb: Die Drehzahl ist höher als die zur anliegenden Spannung gehörende Leerlaufdrehzahl.
Überlegen wir uns nun was dabei passiert:
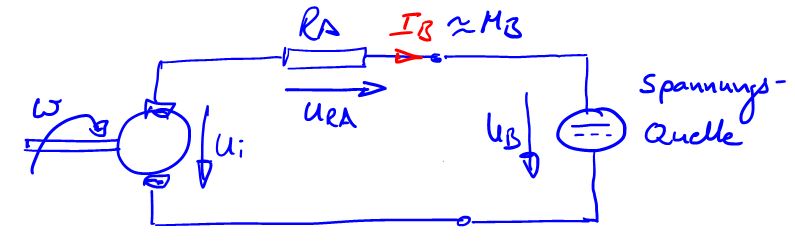
Schauen wir uns dazu das bekannte Ersatzschaltbild der Gleichstrommaschine an, allerdings jetzt für den Generatorbetrieb. Die Stromrichtung kehrt sich um und bei gleicher Polarität der Spannung damit auch der Leistungsfluss. Welcher Strom sich einstellt und damit das Belastungsmoment an der Welle (auch hier gilt natürlich M~I) hängt von der Spannungsdifferenz zwischen induzierter und angelegter Spannung ab sowie vom Ankerwiderstand.
Aufgabe 3c):Leiten Sie sich mit Hilfe des Ersatzschaltbild die Gleichung für den Motorstrom B her in Abhängigkeit der induzierten Spannung, der Motorspannung und des Ankerwiderstands Ra.
Aufgabe 3d): Ermitteln Sie mit Hilfe des Datenblatt den maximal möglichen Strom welcher Motor B im Generatorbetrieb abgeben kann.
Wie sie bereits herausgefunden haben fließt der größte Strom bei kurzgeschlossenen Motorklemmen. Diesen Zustand können wir auch elektronisch herbeiführen durch eine entsprechende Ansteuerung der H-Brücke, siehe Teilaufgaben 1b). Im einfachsten Fall müssen wir dazu lediglich die gewünschte Ausgangsspannung auf 0V (Duty = 0%) einstellen.
Sie können dazu folgendes Experiment durchführen:
- Ziehen Sie den Anschlussstecker von Motor B ab
- Stellen Sie das PWM Verhältnis für Motor A auf 20% und starten Sie den Motor (Er befindet sich jetzt im Freilauf)
- Schließen Sie die Motorklemmen von Motor B kurz. Dadurch zwingen Sie UB = 0V
- Beobachten Sie wie sich Motor A abmüht …..
- Erhöhen Sie das PWM-Verhältnis auf 30% und beobachten Sie dabei die Stromaufnahme von Motor A
- Deaktivieren Sie Motor A
ACHTUNG: Wir sind bereits hier außerhalb des Bemessungsmoments. Stellen Sie den Zustand nicht all zu lange ein. Beobachten Sie ggf. die Wärmeentwicklung beider Motoren (fühlen).
Jetzt mit Motor an der variablen Spannungsquelle:
- Kontaktieren Sie Motor B wieder mit der Leistungsplatine und kontrollieren Sie ob beide Motoren die Welle nach wie vor in die gleiche Richtung drehen
- Stellen Sie das PWM Verhältnis für Motor A auf 20% und starten Sie den Motor (Er befindet sich jetzt im Freilauf)
- Stellen Sie das PWM Verhältnis für Motor B ebenfalls auf 20% und starten Sie den Motor.
- Reduzieren Sie das PWM Verhältnis für Motor B in Schritten bis auf 0%, danach wieder zurück auf 20%
- Erhöhen Sie das PWM Verhältnis für Motor B langsam auf 30%
- Deaktivieren Sie beide Motoren
Aufgabe 3e): Beschreiben Sie was beim zuvor durchgeführten Experiment unter Schritt 5 passiert ist. In welchem Zustand befinden sich die Motoren?
Drehzahl- Drehmomentenkennlinie
Nach all den Vorarbeiten sind wir jetzt soweit, dass wir uns an die Ermittlung unserer wichtigsten Kennlinie wagen können. Sie können entweder die Kennlinie von Hand aufzeichnen, das bedeutet einzelne Punkte manuell anfahren und die Werte notieren, oder den Ablauf automatisieren. Denken Sie bitte stets daran, dass bei jeder Änderung der Anregung (Motorspannung) der eingeschwungene Zustand abgewartet werden muss. Das bedeutet der automatisierte Ablauf muss entsprechend langsam durchlaufen werden (wir haben ja Zeit ….). Unser maximales Bremsmoment ist erreicht wenn über der Belastungsmaschine eine Spannung von 0V anliegt (Duty_B = 0).
Aufgabe 4a): Ermitteln Sie jeweils für eine Motorspannung von 10V und 18V (Einstellung über Duty) die n(M) sowie die I(M) Kennlinie des Motors A. Verwenden Sie zur Belastung der Maschine Motor B im Generatorbetrieb.
Aufgabe 4b): Welche generellen Aussagen lassen sich für die beiden Kennlinien bei unterschiedlicher Motorspannung treffen?
Abschluss
Ich würde mich über ein kurzes Feedback zur ersten Versuchsaufgabe freuen. Bitte beantworten Sie mir optional folgende Fragen:
- Wie sinnvoll fanden Sie den Versuch: Bitte eine Angabe in Schulnoten (1-6)
- Wie lange haben Sie zur Bearbeitung der Aufgaben benötigt (in Stunden)
- Was Ihnen sonst so einfällt zum Versuch ….